
18 Scientific Paper on the Topic Written by the Speaker
Stretchable, Transparent, Ionic Conductors (2014) [5]
The paper authored by Christoph Keplinger and his team provides an unprecedented look into the realm of stretchable, transparent ionic conductors, which can redefine how we approach the fabrication of sensors, actuators, and interconnects in stretchable electronics and soft machines. The ionic conductors described here leverage the intrinsic properties of hydrogels and gels swollen with ionic liquids to offer a solid yet highly stretchable and transparent alternative to the mostly electronic conductors traditionally used in stretchable devices. These ionic conductors perform superiorly, capable of operating at frequencies beyond 10 kilohertz and at voltages above 10 kilovolts.
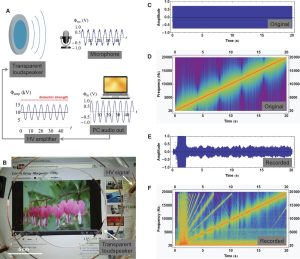
A significant innovation detailed in the paper includes a transparent actuator capable of generating broad strains and a transparent loudspeaker that outputs sound across the entire audible range. This is achieved without any electrochemical reaction, a notable advancement providing a mechanism for electromechanical transduction through materials normally not associated with such high performance. Although the ionic conductors have higher resistivity compared with some electronic conductors, they offer lower sheet resistance when high stretchability combined with high transparency is a requirement, making them particularly well suited for specific applications where these attributes are essential.
The research outlines the material creation process, which involves an electrolyte and a dielectric in series, and illustrates the efficacy of various designs through practical demonstrations like the ‘beating heart’ actuator. This application mirrors the electromechanical behavior of biological tissues and is transparent to all visual colors. Another application showcased is the transparent loudspeaker, which transforms input voltage signals into audible sound, ranging from low to high-frequency sweeps.
Overall, the research represents a substantial step forward in stretchable ionics, expanding the toolbox available for integrating soft materials into electronic and robotic systems. It lays the groundwork for future innovations in fields as varied as soft robotics, biomedical devices, wearable electronics, and sensory experiences. The paper not only highlights the strides made in material properties but also encourages further exploration of transparent, stretchable ionic conductors that can meet the demands of high-speed and high-voltage operation while remaining compatible with living tissues and offering new design opportunities for soft machines and electronics.
Hydraulically Amplified Self-healing Electrostatic Actuators with Muscle-like Performance (2018) [1]
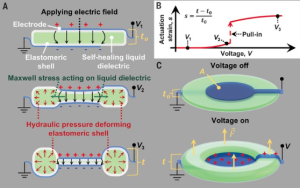
The article presents the development of HASEL actuators with muscle-like performance, a novel class of soft actuators capable of overcoming the limitations of conventional soft robotic actuators. HASEL actuators embody an innovative design that merges the strengths of both soft fluidic and electrostatic actuators. This design principle involves utilizing electrostatic forces acting on liquid dielectrics within an elastomeric shell to create pressure and movement, akin to how a muscle operates. A significant advantage of these actuators is their ability to self-heal after damage due to dielectric breakdown, which enables them to maintain functionality and reliability overtime—an aspect vital for the scalability and practical deployment of soft robotic systems.
The article showcases a range of HASEL actuator designs, which demonstrate muscle-like capabilities such as self-healing properties, versatility in performance, and robustness. The materials used are widely available, and common fabrication techniques are employed to produce these actuators. For instance, vegetable-based transformer oil is used as the liquid dielectric, silicone rubber forms the elastomeric shell, and ionically conductive hydrogels serve as the electrodes. The unique combination of these materials allows for the production of actuators that can perform highly dynamic tasks, such as lifting heavy weights or delicately handling fragile objects.
HASEL actuators are presented with the potential to revolutionize soft robotics, offering enhancements over existing technologies through improved force and strain scaling capabilities while maintaining high speed and energy efficiency. The application of HASEL actuators extends to soft grippers capable of handling delicate items and self-sensing artificial muscles that can power robotic arms. The autonomous self-sensing feature, derived from changes in capacitance during deformation, paves the way for more responsive and intuitive control systems in soft robotics.
The research findings suggest that HASEL actuators stand as a promising platform for creating more advanced, lifelike robotic systems with applications that could significantly impact various fields, including biomedical devices, industrial automation, and interactive technologies.
A Multifunctional Soft Robotic Shape Display with High-speed Actuation, Sensing, and Control (2023) [6]
The article presented showcases an innovative multifunctional soft robotic shape display comprising a 10×10 array of scalable cellular units that amalgamate high-speed electrohydraulic soft actuation, magnetic-based sensing, and intricate control circuitry. The display demonstrates exceptional performance in reversible shape morphing, capable of up to 50 Hz, coupled with the sensing of surface deformations and external forces with impressive sensitivity. This high accuracy and speed of actuation and sensing equip the display with a diverse array of applications, ranging from interactive user interfaces to displaying images, sensing object mass, and dynamically manipulating solids and liquids. The paper illustrates how this integration of actuation, sensing, and control at an extensive scale has not only bridged the gap in soft robotics but has also significantly advanced the capabilities of soft electrohydraulic arrays.
The authors discuss the term “shape displays” and its applications in various fields such as manufacturing, user interaction, and aerodynamics. Despite the progress, certain limitations have hampered the full potential of existing shape displays, including issues like surface discontinuity, low fidelity in surface geometry, and slow shape changes. To counter these challenges, the article promotes the integration of high-speed soft robotic actuators with sensors and control mechanisms, emphasizing the compliance, robustness, and intelligence of soft materials, which have proven successful in applications like wearable technologies and human-robot interaction.
This paper introduces a new type of shape display, built upon an array of cellular units that tightly integrate soft actuation with embedded deformation sensing and control—each cell powered by a Hydraulically Amplified Self-healing Electrostatic (HASEL) actuator known for high-frequency actuation and specific power. The displays obtain deformation feedback via magnetic-based sensors, with an elastic surface skin providing a compliant interface between the cells and their environment. Highlights include enhancement in electrostatic charge control, distributed sensing, and control algorithms allowing for precise control of individual cells. This integration harnesses the strengths of soft materials and electrohydraulic mechanisms to propose advanced applications for shape displays and opens up new dimensions in robotic interaction and functionality.

Media Attributions
- https://www.science.org/doi/full/10.1126/science.1240228
- https://www.science.org/doi/full/10.1126/science.aao6139
- https://www.nature.com/articles/s41467-023-39842-2
